|
Taeyeop Lee, Bowen Wen, Minjun Kang, Gyuree Kang, In So Kweon, Kuk-Jin Yoon
Any6D: Model-free 6D Pose Estimation of Novel Objects
CVPR 2025
[pdf]
[code]
[project page]
Star
Fork
|

|
Cheng-Chun Hsu, Bowen Wen , Jie Xu, Yashraj Narang, Xiaolong Wang, Yuke Zhu, Joydeep Biswas, Stan Birchfield ( project leader)
SPOT: SE(3) Pose Trajectory Diffusion for Object-Centric Manipulation
ICRA 2025
[pdf]
[code]
[project page]
Star
Fork
|
|
Yijia Weng, Bowen Wen , Jonathan Tremblay, Valts Blukis, Dieter Fox, Leonidas Guibas, Stan Birchfield ( project leader)
Neural Implicit Representation for Building Digital Twins of Unknown Articulated Objects
CVPR 2024
[pdf]
[code]
[project page]
Star
Fork
|
|
Bingjie Tang, Iretiayo Akinola, Jie Xu, Bowen Wen, Ankur Handa, Karl Van Wyk, Dieter Fox, Gaurav S Sukhatme, Fabio Ramos, Yashraj Narang
AutoMate: Specialist and Generalist Assembly Policies over Diverse Geometries
RSS 2024
[pdf]
[code]
[project page]
|
|
|
Caelan Garrett*, Ajay Mandlekar*, Bowen Wen, Dieter Fox
SkillMimicGen: Automated Demonstration Generation for Efficient Skill Learning and Deployment
CoRL 2024
[pdf]
[project page]
|
|
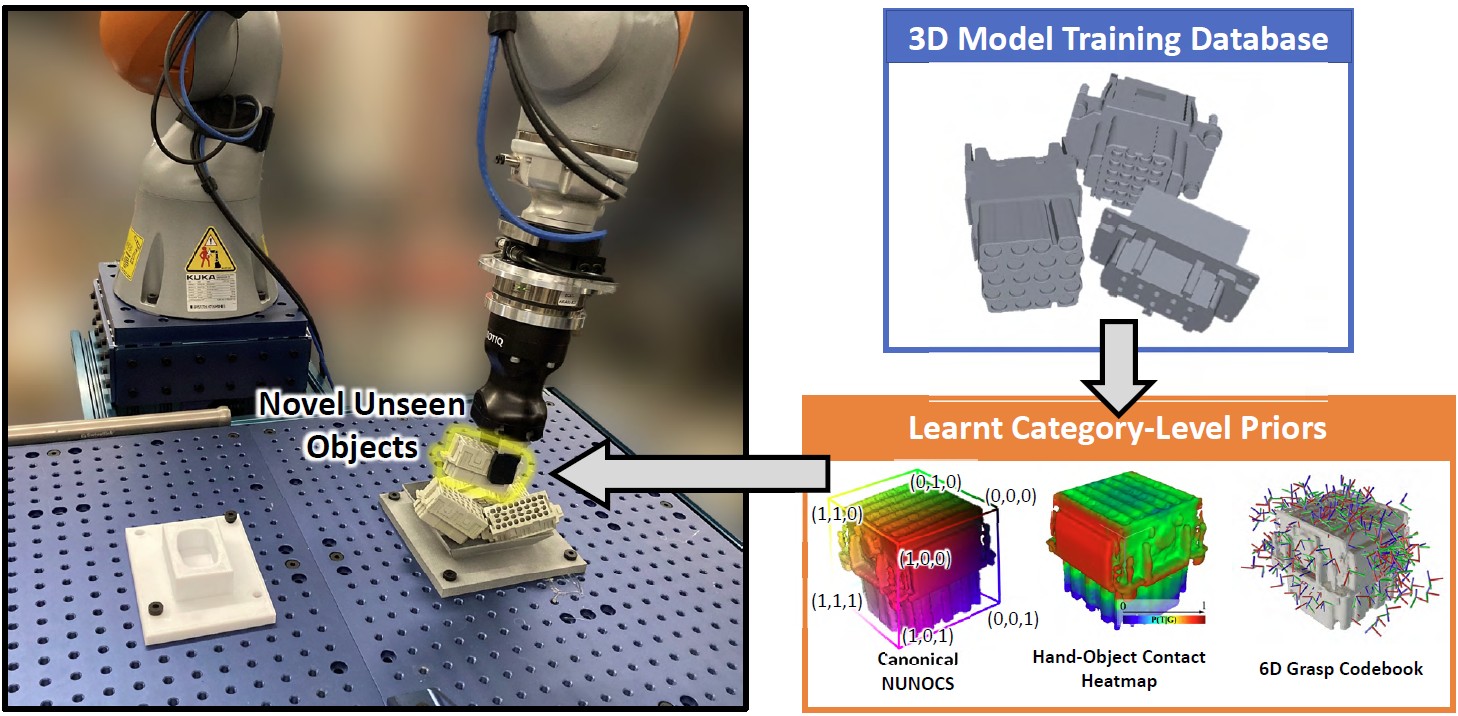
Bowen Wen, Wenzhao Lian, Kostas Bekris, Stefan Schaal
You Only Demonstrate Once: Category-Level Manipulation from Single Visual Demonstration
RSS 2022 (🏆 Best Paper Nomination)
[pdf]
[code of tracking]
[code of grasping]
[video]
|
|
Andrew Morgan*, Kaiyu Hang*, Bowen Wen, Kostas E Bekris, Aaron Dollar
Complex In-Hand Manipulation via Compliance-Enabled Finger Gaiting and Multi-Modal Planning
IEEE Robotics and Automation Letters 2022
[pdf]
[video]
[news
coverage]
|
|
Junchi Liang, Bowen Wen, Kostas Bekris, Abdeslam Boularias
Learning Sensorimotor Primitives of Sequential Manipulation Tasks from Visual Demonstrations
ICRA 2022
[pdf]
[video]
|
|
Andrew S. Morgan*, Bowen Wen*, Junchi Liang, Abdeslam Boularias, Aaron M. Dollar, Kostas Bekris (* equal contribution)
Vision-driven Compliant Manipulation for Reliable, High-Precision Assembly Tasks
RSS 2021
[pdf]
[video]
|
 |
Mitash, Chaitanya, Shome, Rahul, Wen, Bowen, Boularias, Abdeslam, Bekris, Kostas
Task-driven Perception and Manipulation for Constrained Placement with No Shape Priors
RA-L and IROS 2020
[pdf]
[video]
|
 |
Bowen Wen, Chaitanya Mitash, Sruthi Soorian, Andrew Kimmel, Avishai Sintov, Kostas E. Bekris
Robust, Occlusion-aware Pose Estimation for Objects Grasped by Adaptive Hands
IEEE International Conference on Robotics and Automation (ICRA) 2020
[pdf]
[code]
[video]
Star
Fork
|